数理情報学研究室の助教の日永田智絵です。数理情報学研究室では、生体やそのインタラクションをシステムとしてとらえ、数理モデルを通してその基本原理を解明し応用する研究をしています。これは、計算学(機械学習)、理学(生命数理)、工学(信号処理)を広くカバーする境界領域研究です。
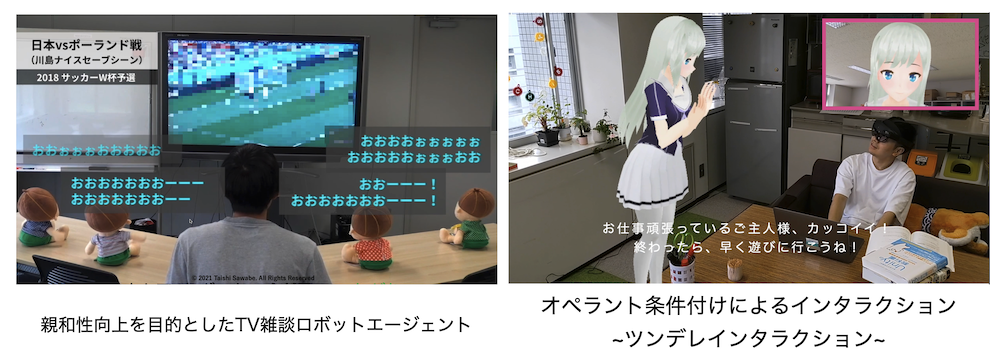
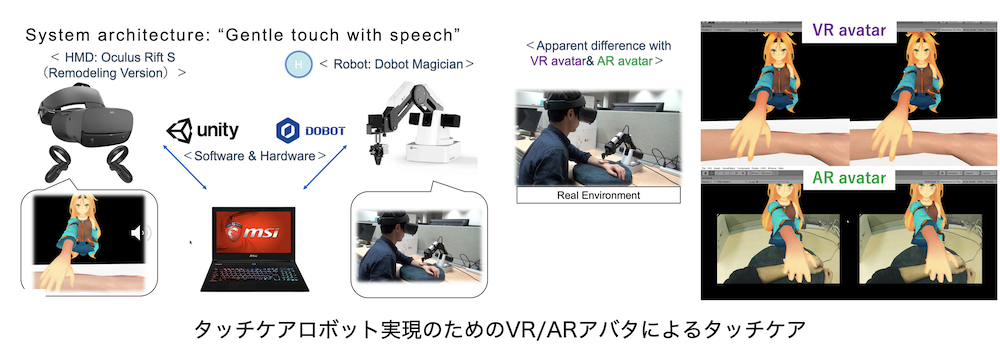
その研究室の中で私は感情を持つロボットの開発に取り組んでいます。これは感情を実装することを通して、感情のメカニズムを解明するという構成論的アプローチでもあります。本記事では、私の取り組みについて紹介します。
感情とは何なのか?
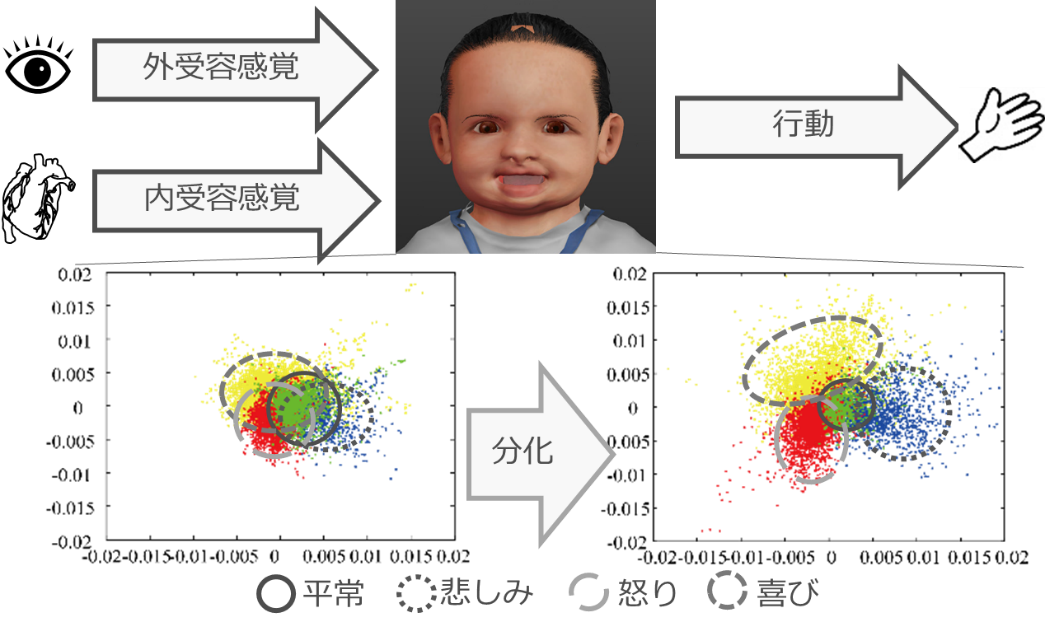
感情は自身の中にあるモノなのに、何かと言われると説明しがたいものです。実際研究においてもその定義は様々です。私は神経科学者のアントニオ・ダマシオの定義に従い、刺激に対して起こる身体反応を情動、それを認知したものを感情とする定義を用いています。この定義にもあるように、身体は感情においてコア的な重要な役割を持っていると考えられています。近年では、5感などの身体の外からの情報である外受容感覚と内臓などの身体内部からの情報である内受容感覚が統合されることによって感情が作り出されるという考えが有力視されています。
また、感情において重要な側面としては、学習と個体差です。例えば、ブリッジスは幼児は興奮を持って生まれ、そこから徐々に感情を分化させていくという感情分化を提案しています。さらに、リサ・フェルドマン・バレットが感情に指紋はないというように、何かの感情を特定できるような決まった反応はないのだという考えも広まってきています。文化差に関係なく共通であるとしたエクマンの基本6感情はいくつかの反証がなされ、文化差があることが主張されています。このように、感情の学習は、文化を初めとした、様々な環境いわゆる学習データに依存して行われると考えられ、決まった正解のようなモノが存在するわけではないと考えられます。
感情モデル開発
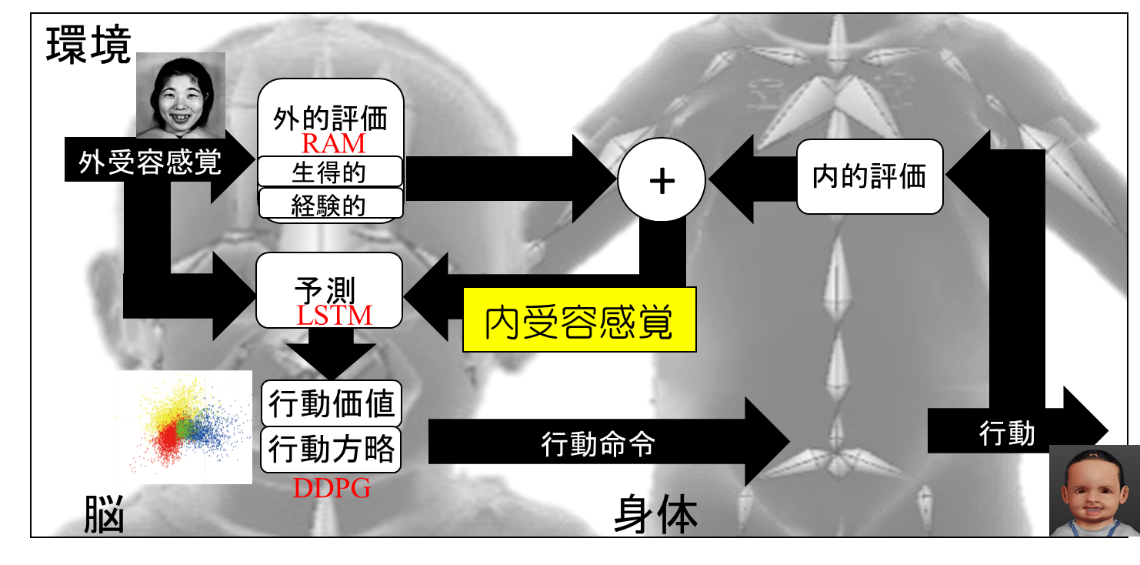
前述したように、感情は徐々に文化し、学習されるものだと考えられます。その考えのもと、私はこれまでの研究の中でDeep Emotionという感情モデルを開発しました。この感情モデルでは前述した感情分化をシミュレーションすることを目的としています。モデルは既存の概念的な感情モデルから構築されています。外受容感覚と内受容感覚を統合し、行動を出力するモデルとなっています。具体的には外受容感覚として画像を入力として、行動として表情を出力するモデルとなっていて、自身の身体の一定化を報酬として、最適行動を学習していきます。自身の身体を一定化する働きは人間にも備わっており、ホメオスタシスと呼ばれています。モデルは各モジュールを深層学習モデルで実装しています。詳しくは論文を参照してください。本モデルで感情分化のシミュレーションを行った結果、喜び・怒り・悲しみ・ニュートラルの4つが徐々に分化していく様子が観測されました。これはブリッジスの主張する感情分化の快がわかれ、不快が細分化する様子と同様のものでした。本研究はまだ発展途上ですので、今後様々な方向から改善していきます。
今後の展開
現在、プロジェクトとしてはJST ACT-X AI活用で挑む学問の革新と創成にて「感情を持つロボットの開発に向けた情動反応モデルの構築」やJSPS 学術変革領域研究(B)にて「ロボットの嫉妬:嫉妬生成モジュールを用いた統合モデルの構築」などに取り組んでいます。前者はより身体に注目して、人の生体信号を計測し、そのモデル化を実施するプロジェクトです。これによって、ロボットにはない内臓の感覚についての情報を得ることができ、より人に近い感情構造を持つロボットの開発に寄与できます。後者は感情の中でも他者や文化など高次な情報が必要といわれる社会的感情に着目し、マウスやサルの研究者の方とコラボレーションしながら、社会的感情の中でも嫉妬のメカニズムの解明を目指す研究です。私一人の手でできることはほんの少しですが、色々な方とコラボレーションしながら、より広がりをもった研究を実施したいと思っています。
著者紹介
日永田智絵(ひえいだ ちえ)
電気通信大学大学院 博士(工学)。日本学術振興会特別研究員(DC1)、大阪大学先導的学際研究機構附属共生知能システム研究センター 特任研究員を経て、2020年より奈良先端科学技術大学院大学 先端科学技術研究科情報科学領域 助教。感情発達ロボティクスの研究に従事。
Webサイト:https://www.hieida.com/