朝
AM6:47,カーテンが自動で開く音と,いつものあの曲で目が覚める.30分程前にスイッチがついたエアコンのおかげで部屋は暖かく,なんの躊躇もなく布団から抜け出す.起床予定はAM7:00だけれど,眠りの浅いタイミングを見計らって起こしてくれるので,毎日すんなり起きられて,二度寝して遅刻することもない.
シャワーを浴びて部屋に戻ると,少し暖房が抑えられたリビングでテレビがスイッチオン.自分の関心事を学習済みのテレビから,昨夜の野球の結果と今日の天気、そしてお気に入りのアイドルのニュースがダイジェストで流れてくる.どうやら通勤経路で事故が発生しているらしいし,夕方からは雨になるらしいので,折りたたみ傘を持って10分早く外出する.以前は,電気やエアコンを消し忘れることもあったが,今はスマートホームが消してくれるので心配ない.余計なことを考えず,今日も一日集中!
夕方
仕事を終えた後,スーパーによってから帰宅.不在時に家を綺麗にしてくれていたお掃除ロボットが,帰宅時間を察知して玄関でお出迎え.部屋に入れば,加湿器とエアコンが部屋を快適にして待っていてくれる.購入した品物を冷蔵庫にしまうと自動で在庫リスト作成し,スマートフォンで閲覧可能にしてくれる.おかげで,今日は朝食用の納豆を買い忘れずに済んだ.
音楽を聴きながら一休みした後,夕食を作り始めるとエアコン・加湿器が停止し,部屋が無駄に暑くなることを防いでくれる.よく歩いたこんな日には,スタミナ料理のレシピが推薦されていて,冷蔵庫にも「ビールOK」のサイン!健康も考えられた至極の一杯.
夕食後はいつもの読書の時間.音量が自動で絞られ,スタンド以外の電気が少しおとされる.この時間が,私のリラックスタイム.落ち着いた気持ちで布団に入る.もちろん,スマートフォンを枕元におくことを忘れない.こいつのおかげで,入眠を察知したエアコンが自動で温度調整してくれるし,朝もしっかり起こしてくれる.快適な睡眠・生活に欠かせない相棒である.さて,明日も一日がんばろう.
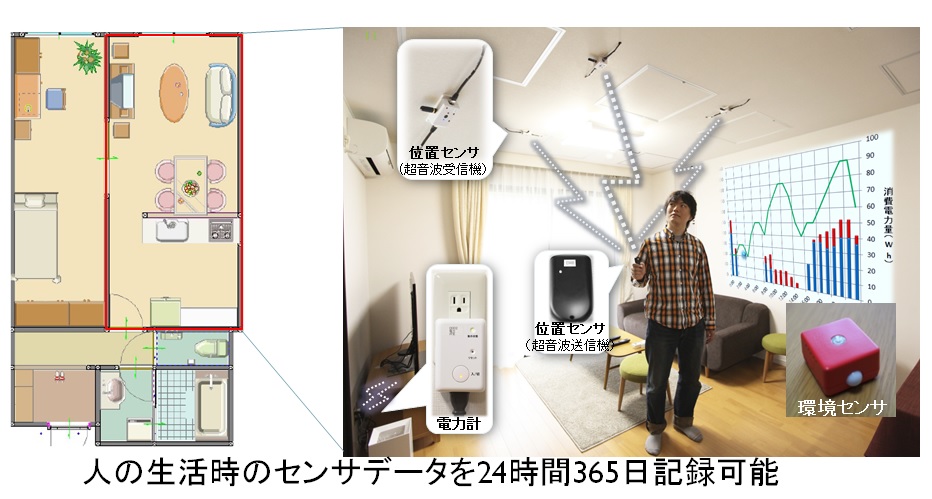
さて,こんな生活を送るためには,どんな技術が必要でしょうか?まず,重要になるのがコンテキスト(居住者の状態)の認識です.言い換えると,「シャワーを浴びる」「外出する」「夕食を作る」「読書する」など,居住者の生活行動を認識する必要があります.我々は,どうすれば人の生活行動を認識できるかを明らかにするために,多数のセンサを設置した1LDKのスマートホームを大学内に設置し,実験を行っています.スマートホームには,一般家庭にあるような家電やお風呂なども備わっていて,実際に住むことができます.2泊3日程度の実験宿泊から,これまで最長で2週間ほど滞在した人もいます.
スマートホームで行動認識を行う際にポイントになるのが,可能な限りプライバシーに配慮したデータ収集と,コストの低減です.例えば,たくさんのビデオを設置し画像解析することでも人の生活行動は認識できます.しかしながら,毎日ビデオカメラで監視されている生活を想像してみてください.嫌ですよね.そこで我々は,プライバシーに配慮するために,スマートハウス内における人の位置情報と家電の電力使用量のみを利用して生活行動を認識しようと試みています.
次に,コストの低減ですが,我々のスマートハウスには人の位置情報を誤差10cmで測定できる超音波センサが設置されています.とても高精度なセンサですが,非常に高価で一般家庭に普及できるものではありません.そこで我々は,あえて位置情報の測位精度を劣化させた場合を想定した実験を行っています.同様に,電力使用量を計測するセンサも16個設置されていますが,あえて測定する電力計の数を減らした実験を行っています.
.
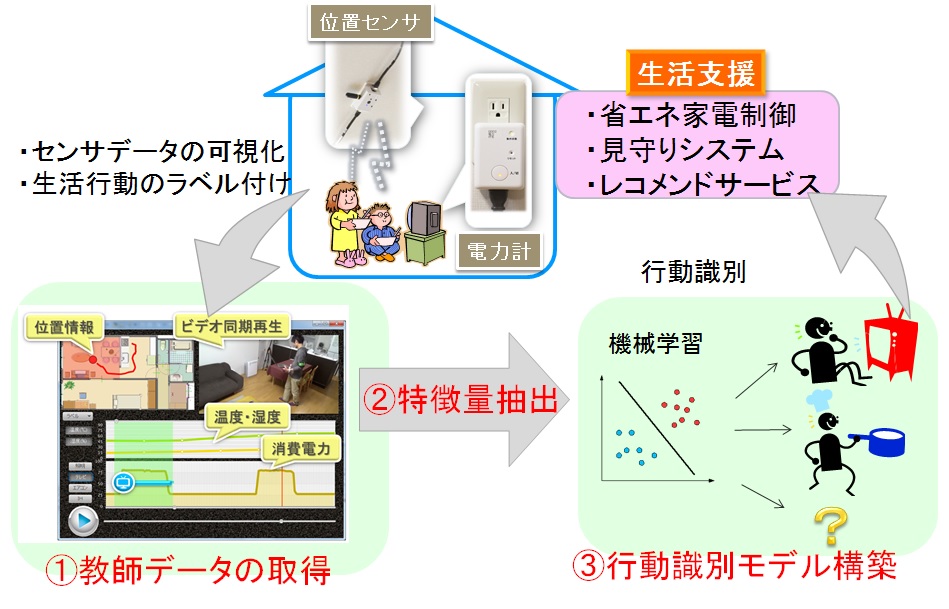
その結果,高精度・多数のセンサを使用した場合,「テレビ視聴」「読書」「食事」「睡眠」「仕事・勉強」「入浴」「掃除」「料理」「食器洗い」「外出」の10の生活行動を95%以上の精度で判定可能であることを確認しています.さらに,位置と電力使用量の精度を部屋単位に落とした場合でもあっても,85%以上の精度で判定可能であることを明らかにしています.つまり,プライバシーに配慮しながら低コストで生活行動を判定することが可能であるということです.こうした生活行動の認識と,部屋に設置された環境センサやスマートフォンのセンサを組み合わせることで,入浴や料理に応じて暖房や加湿を抑えたり,読書や外出を判定して照明を調整したりすることができるようになります.
では,「眠りの浅いタイミングを見計らって起こしてくれる」や「入眠を察知したエアコンが自動で温度調整」を実現するためには,どうすればいいでしょうか?これを実現するためには,人の眠りの深さをセンシングする必要があります.一般的に,睡眠段階は5段階に分類されます.この計測は,専門の機器を使えばそう難しいことではありませんが,一般家庭にそんな機器はありません.では,どうしたらよいのでしょうか?
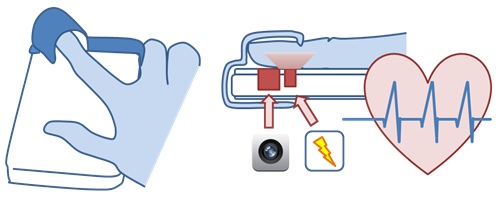
我々はスマートフォンに着目しました.スマートフォンは,我々にとって非常に身近で優秀なセンサデバイスなのです.例えば,スマートフォンの加速度センサを使えば体動を検知することができます.また,カメラとフラッシュライトを使うと脈拍が取れます.この脈拍の変化を利用することで睡眠状態を推定しようと試みています.
まず,スマートフォンアプリケーションによる脈拍数推定手法を開発しました.評価実験の結果,2分間の測定おいて,心拍計と比較して十分な測定精度であること(平均誤差1.83bpm)を確認しています.次に,ここで得られた脈拍データと睡眠状態データを機械学習することにより睡眠段階の識別モデルを構築しました.その結果,脈拍のみを用いて人が眠っているか起きているかを90%の精度で推定できることを明らかにしています.このようにスマートフォンを利用して人の睡眠状態を認識することで,その人の状態に合わせた家電制御ができるようになります.これできっと将来は夏の寝苦しい夜にエアコンのリモコンと格闘することはなくなります.
スマートフォンを用いたコンテキスト認識の研究対象としては,睡眠状態の判定だけでなく,人の空腹度推定や健康状態の推定,心理状態の推定なども行っています.いつでも持ち歩くスマートフォンと連動することで,スマートホームは食事の時間や献立を勧めたり,情緒不安定のときには部屋をリラックスできる調光や音楽で満たしたりすることが可能となります.我々,ユビキタスコンピューティングシステム研究室では,そんなスマートホームの実現に向けたさまざまな研究を行っています.
ユビキタスコンピューティングシステム研究室では,未来のユビキタス社会の実現を目指し,センサ・デバイス・ネットワークが連携し,センサから取り込まれる実世界データを処理・集約・解析することで,高度なサービスを効率よくユーザに提供するシステム=ユビキタスコンピューティングシステムの実現に向けた研究に取り組んでいます.スマートホームだけでなく,実世界の問題に対して「情報の収集」,「収集した情報の分析」,「分析結果の応用」の三位一体で取り組み,具体的には以下の研究を行っています.

研究内容や研究室に興味がありましたら,ユビキタスコンピューティングシステム研究室のホームページもご覧いただけると幸いです.見学や質問は随時受け付けています.
文責:助教 諏訪 (h-suwa@is.naist.jp)